相机响应模型
这是在阅读下面这个文献是遇到的概念
A New Low-Light Image Enhancement Algorithm using Camera Response Model ∗
相机响应曲线
首先,物体在反射光进入相机后,相机成像具有一个响应曲线,理论上响应曲线应该是对不同波段不同强度的光能线性还原。但是实际为一个S曲线,例如下图所示:
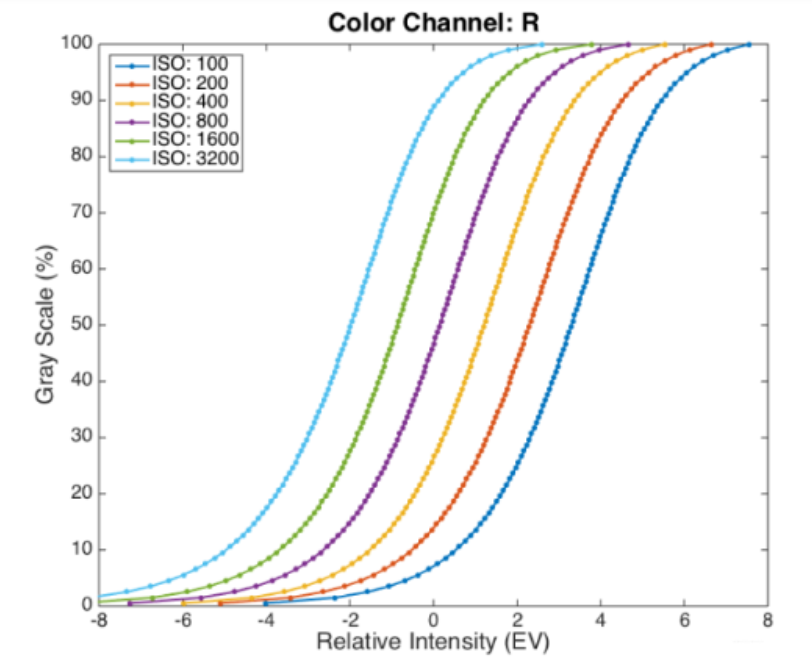
横坐标为 实际的进入相机的亮度,而纵坐标代表感光元件量化后的像素值强度,例如纵坐标为50就代表成像后的像素值为0.5x255…同时上图中 ISO 的调节可以将相机响应曲线平移,但是并不能改变相机响应曲线的形状。在x轴上平移就使得相机对不同的输入光强更敏感。ISO(感光度)
因此相机响应函数就是指的上面这个曲线
ISO 控制传感器自身对亮度的感知范围,而 快门+光圈 = 曝光,快门控制进光时间,光圈代表进光的窗口大小
方法
LIME以及其他使用Retinex分解的方法中,都认为 I = V X R 这个 V 是图像的亮度(或者叫曝光,曝光本质就是进入摄像机的总的光量),但其实更准确的说,这个 V 应该是物体反射后的光的强度。但是经过成像后,是有个相机响应模型的后处理,因此 这篇文章中认为 I = f(V) x R => R = I / f(V) => 其中V使用和LIME中类似的估计。而 f 函数是相机的响应曲线,对于固定的相机,这个响应曲线应该是固定的,因此在 一个数据集上 去 标定相机响应曲线的参数即可。
那么增强的步骤就是:估计 亮度 V 带入抑制的相机响应模型对图像提亮
(具体公式还得详细推导)