SVM舰船识别
环境配置
win系统下 qt crator + opencv2.4.9配置
https://src.fedoraproject.org/rpms/opencv/blob/f24/f/opencv-2.4.12.3-gcc6.patch
策略
为了快速准确地提取舰船目标, 目前的舰船检 测方法通常采取由粗到精的策略, 首先从大幅图像 中快速提取出候选区域, 利用反映舰船目标的最为 明显且计算量小的一些特征, 确定出舰船目标可能 存在的区域; 然后再利用精细特征对候选区域进一 步确认分析, 去除虚警, 找出真实的舰船目标
对于小于 3m的低分辨率遥感图像 ,由于分辨率较低 ,图 像中无法反映出舰船目标的细节特征 ,所以仅计算每个候选 目标进行一阶灰度特征。包括平均灰度、方差、一阶能量、 一阶熵等 )来构建目标向量。
对于高于 3m的高分辨遥感图像 ,由于图像可以反应目 标细节特征信息 ,因而在构建目标向量过程中 ,可以通过增加 灰度共生矩阵的二阶纹理特征 [16] (包括相关性、局部平稳、惯 性矩、二阶熵等 )和形状不变矩 来提高识别的精确度。
特征
灰度分块特征
论文:基于SVM 的高分辨率SAR图像舰船目标检测算法
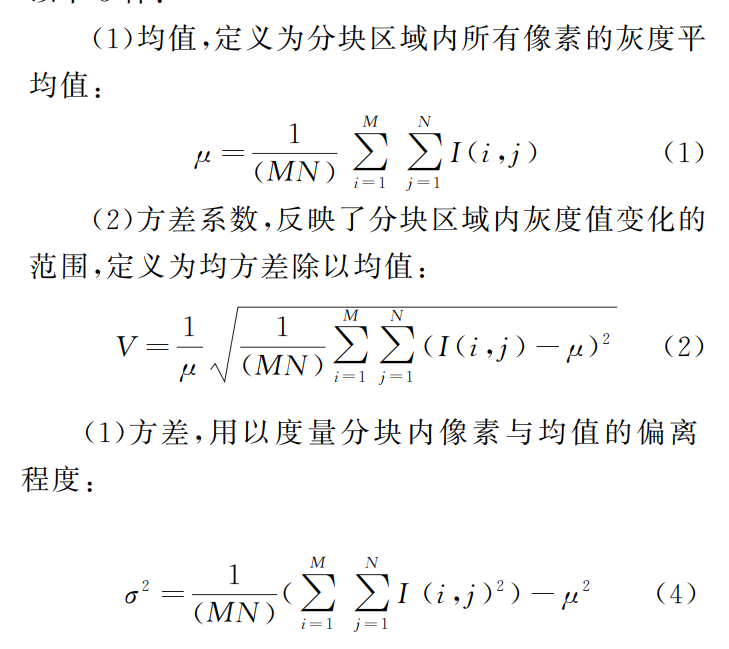
亮度特征
- 块灰度均值,像素均值
- 方差系数,是个值 就是方差
- 质量,即灰度总和
纹理特征:
- 方差,和上面的方差不太一样
- 加权填充比 分块区域中 n 个最亮的像素值占分块区域内总能量的比例
- 离散系数 ?
- 灰度最大起伏量 最大 - 均值
峰值特征:
- 峰度 ?
- 偏差系数:表示分块内灰度值分布不对成程度的统计
其他灰度特征:
- 灰度能量比函数,反应对分块图像能量的一种度量 ?
- 熵
- 标准差。和前面的有点相似
1,2,4特征组合成特征向量效果最好
Hog特征
Gabor 滤波
几何形状特征
论文:高分辨率光学遥感图像舰船目标检测关键技术研究
基于船头检测与船体轮廓定位的舰船检测算法。该算法根据船头区域在极坐标变换域上可近似为梯形形状的特点,首先在极坐标变换域上对Harris角点区域提取一系列船头形状特征,使用SVM分类器筛选出疑似船头区域,同时给出船身的初始方向;然后,借助于周围与船身方向一致的直线段对船身初始方向进行修正,可得到更加准确的船身方向,并利用船体轮廓的对称性与船体轮廓处直线段定位出船身;最后通过海洋上下文信息剔除掉虚假船只
紧致度,凸度,矩形度,偏心率,矩不变量
不变矩特征
论文:基于支持向量机的遥感图像舰船目标识别方法_李毅
不随图像位移 旋转 尺度 变化。但是不变矩特征仅能构表现物体的整体形状特征, 而不能提 取细节分量上的特征信息 + 共生矩阵求纹理特征(这个需要尺寸较大 例如 3m分辨率以上)
纹理特征
简单为例特征:均值,方差,矩,熵
灰度共生矩阵
实验
降分辨率测试
首先按照不变长宽比的原则将 扣出用于训练的图像块
在训练时将 图像块 resize 为 train_size,训练svm
测试的时候,输入为一张完整的图片,已知图中的目标的大小,按照 设置的 obj_size,将原图缩小,使得目标的尺寸 = obj_size
测试一:
hrsc数据集 crop 出来的原图
测试发现 obj_size = 10 检测率和虚警率都不会降低。难道是因为 这样缩放虽然目标的信息丢失了,但是背景的信息也丢失了,所以实际信噪比不变 ,检测率就不怎么改变
如果是常规小目标 输入图像是1280*720的尺寸,如果hog特征的尺寸还是设置为80x80,输入测试的时候就检测不到图上存在的10x10的小目标。